一、混動能量管理發(fā)展背景與意義
混合動力汽車能夠在不同工作模式下耦合利用多種能源(油、電、氫以及碳中性燃料),從而顯著提升能源利用效果,同時,快速發(fā)展的智能與網(wǎng)聯(lián)技術為實現(xiàn)混合動力汽車的能量高效利用提供了信息輸入。根據(jù)ITRC團隊研究,通過制定合適的能量管理策略能夠有6%~15%的節(jié)能空間,當達到一定規(guī)模時,能量管理技術能夠帶來極大的社會效益和生態(tài)效益。然而,混合動力汽車能源消耗表現(xiàn)受駕駛工況影響,大部分具有優(yōu)化、智能和網(wǎng)聯(lián)計算功能的能量管理策略未能搭載實車進行在線應用,目前普遍采用基于規(guī)則的能量管理策略,在不同駕駛場景下的適應能力較低。事實上,如果能夠提前預知駕駛工況,就能夠適時調(diào)整工作模式并實現(xiàn)能源/能量的合理分配利用。隨著智能與網(wǎng)聯(lián)技術的快速發(fā)展,多源信息的獲取、駕駛工況的預測、控制能力的提升使得混合動力汽車能量高效利用成為了可能。因此,利用智能與網(wǎng)聯(lián)技術賦能動力傳動系統(tǒng),明確混動能量管理的技術發(fā)展路徑是十分必要的。
二、典型混動能量管理策略及發(fā)展階段劃分
混動能量管理的主要任務是根據(jù)車輛功率需求確定不同動力源的功率輸出。從算法原理出發(fā),能量管理策略主要包括基于規(guī)則的能量管理策略、基于優(yōu)化的能量管理策略和基于學習的能量管理策略。基于規(guī)則的能量管理策略主要依賴工程化經(jīng)驗提前標定好輸出控制量,當滿足條件時按設定值執(zhí)行,優(yōu)勢是實時性強,但能源利用改善效果并不顯著,工況適應性差,主要典型代表是適用于PHEV的CD-CS控制策略。基于優(yōu)化的能量管理策略主要包括瞬時優(yōu)化,滾動優(yōu)化與全局優(yōu)化三種方法,瞬時優(yōu)化算法的典型代表為ECMS和PMP,主要特點是能夠在線實時應用,通過辨識駕駛人風格、意圖及交通狀態(tài)信息,調(diào)整瞬時優(yōu)化自適應因子;滾動優(yōu)化算法的典型代表為MPC,通過在預測時域內(nèi)求解車輛功率輸出控制序列,能夠適應不同駕駛場景,但對信息獲取實時性要求較高,在線應用難度較大;全局優(yōu)化的典型代表算法為DP,通過預知出行工況可獲得理論上最優(yōu)控制序列,但算力負擔大,目前僅作為基準與其它策略進行對比。基于學習的能量管理策略主要代表為RL和DRL,該算法可通過車輛智能體與環(huán)境實時交互,不斷學習并調(diào)整能量管理策略,由于涉及行車安全性,目前仍處于SiL和HiL仿真階段。上述規(guī)則型或瞬時優(yōu)化能量管理策略能夠搭載實車進行應用,而效果更好的能量管理控制策略需要更加豐富的信息,更高算力的芯片以及實時、可靠的通信與響應能力。綜上,上述能量管理過程中最關鍵的兩個環(huán)節(jié)為信息獲取與決策和能量管理與控制,ITRC團隊根據(jù)決策信息豐富度與能量管理效果表現(xiàn)將混合動力汽車能量管理發(fā)展劃分為4個階段。
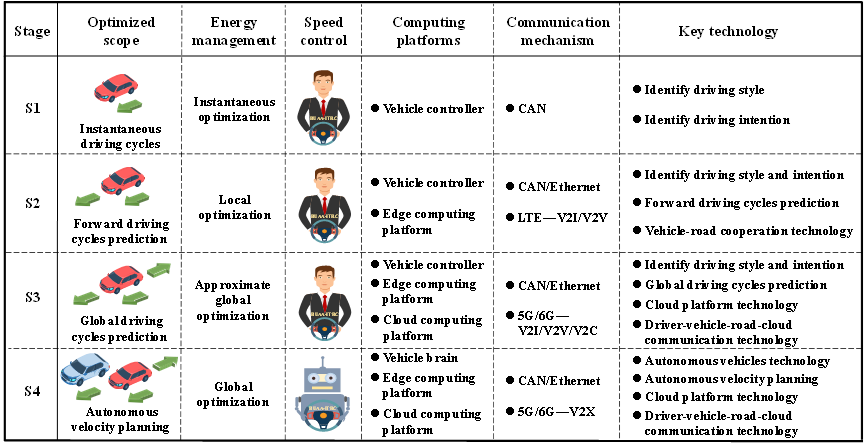
圖1 不同發(fā)展階段特征與關鍵技術
S1階段:基于瞬時工況的能量管理階段。S1階段的能量管理基于駕駛人辨識瞬時工況作為信息輸入,控制器基于規(guī)則或瞬時優(yōu)化的能量管理策略分配混合動力傳動系統(tǒng)的功率輸出,這一階段僅能調(diào)整瞬時工況下的能量分配。本階段動力傳動系統(tǒng)構型、分布式電子電氣架構等硬件配置與能量管理策略、基于信號通訊的軟件架構等軟件配置在出廠時已固定,能量管理策略無法實現(xiàn)在線升級,芯片算力僅能滿足車內(nèi)能量管理規(guī)則的計算需求。
S2階段:考慮前向工況的能量管理階段。S2階段能量管理基于S1階段增加了預測前向駕駛工況信息的任務環(huán)節(jié),控制器基于滾動優(yōu)化或智能學習策略分配混合動力傳動系統(tǒng)的功率輸出。本階段動力傳動系統(tǒng)構型,域控電子電氣架構等硬件配置在出廠時已經(jīng)固定,軟件架構從基于信號的通訊架構向基于服務的架構轉變,支持能量管理策略實現(xiàn)OTA在線升級。這一階段,隨著路側邊緣計算單元的快速發(fā)展,能夠對所覆蓋路段的交通狀態(tài)進行計算分析并通信交互至車載控制器,車載控制器與邊緣計算單元之間能夠完成實時通信交互。
S3階段:融合全局工況的能量管理階段。相比于S1與S2階段,S3階段的能量管理策略將車輛能量狀態(tài)與出發(fā)地至目的地之間的全程交通信息進行實時融合考慮,從而獲取近似全局最優(yōu)的能量分配方案,駕駛人仍為車輛速度的控制主體。這一階段信息決策過程與能量管理過程呈現(xiàn)明顯的解耦狀態(tài),車端控制器無法完成最優(yōu)能量管理任務,需有效結合邊緣設備計算平臺和云平臺聯(lián)合決策分析,并通過5G/6G通信技術,與車端控制器完成信息交互。這一階段動力傳動系統(tǒng)構型、中央計算機電子電氣架構等硬件配置在出廠時已經(jīng)固定,但基于SOA的服務架構不僅能夠支持能量管理策略在線調(diào)整,而且還能接收實時信息。S3階段的關鍵技術在于:車端-邊緣端-云端之間的架構設計,通信交互接口設定以及協(xié)同任務部署。
S4階段:面向速度自主規(guī)劃的能量管理階段。在上述S1~S3發(fā)展階段的基礎上,隨著自動駕駛車輛、智能道路基礎設施以及智能計算平臺技術的成熟,S4階段由自動駕駛車輛為控制主體,能夠按照規(guī)劃的速度序列完成出行任務,能量利用可達到最優(yōu),在出行過程中幾乎不再受駕駛人影響(駕駛人接管車輛除外)。這一階段能量管理框架重新被定義,不同計算平臺的接口協(xié)議也實現(xiàn)標準化。云平臺、邊緣計算平臺端以及車端計算平臺能夠系統(tǒng)且分層完成信息交互與決策控制。這一階段動力傳動系統(tǒng)構型、電子電氣架構等硬件配置在出廠時已固定,端邊云軟件架構靈活度更高,自動駕駛車輛能夠自主感知、自主決策以及自主學習,以最優(yōu)能量利用適應不同的出行任務。
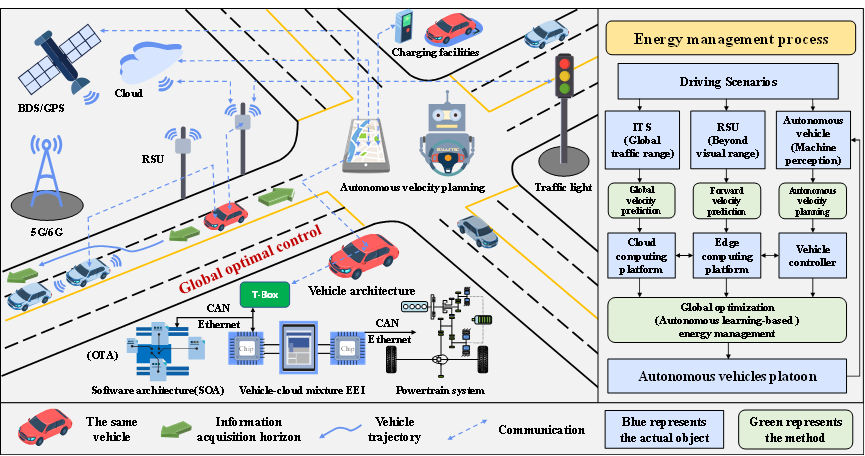
圖2 S4發(fā)展階段示意圖
上述不同發(fā)展階段并不是相互孤立的,未來發(fā)展階段會保留已發(fā)展階段的價值要素。同時,各個階段的發(fā)展特征各不相同,從能量管理效果分析,上述四個發(fā)展階段的目標是實現(xiàn)瞬時最優(yōu),局部最優(yōu),近似全局最優(yōu)以及全局最優(yōu)的能量管理效果。
三、混動能量管理發(fā)展過程中的應用挑戰(zhàn)
混合動力汽車能量管理策略實車應用具有系統(tǒng)性強、協(xié)同性廣、高度復雜等特征,目前大多數(shù)能量管理策略停留在理論研究層面、未能實現(xiàn)實車應用,這是由于能量管理不僅需要算法原理的創(chuàng)新,還包括多源信息的獲取、未來駕駛工況的預測、控制目標的約束、控制平臺與軟件架構所能支持的功能、芯片算力與通信機制等多維度的工程技術問題,主要包括以下幾個方面:
(1)多源信息獲取與處理:交通信息具有高度的時空雙變性、隨機性以及不確定性,對于不同感知設備所獲取的信息數(shù)據(jù)具有不規(guī)則、無關聯(lián)以及非標準化的特征。此外,如何獲取多源信息并進行數(shù)據(jù)過濾融合,進而滿足計算平臺所需的信息格式要求?對于所處理的復雜信息,如何將不同任務部署于合適的計算單元,如車載計算平臺、邊緣計算平臺、云計算平臺等?混合動力汽車能量管理涉及人-車-路-云等不同決策與控制平臺,各個平臺之間需保證低時延、高可靠的實時交互,確定不同異質平臺之間的通信機制是十分重要的。因此,信息的準確獲取和高效處理是能量高效利用的重要前提。
(2)面向不同時空域的功率需求預測:工況預測的效果直接決定了能量管理的表現(xiàn)效果,預測場景的動態(tài)性和不確定性增加了預測難度,如交通信號燈狀態(tài)、交通流狀態(tài)、路面狀態(tài)等動態(tài)變化因素,在預測過程中不僅需要考慮未來時空域中復雜交通場景對能量管理的影響,還需綜合考慮預測的邊際效益,預測信息越準確所造成的算力負擔和算時響應要求就越嚴格,即信息獲取和計算過程所付出的資源成本與能量管理效果之間的平衡點如何界定?其包括多源信息采集與計算資源成本,以及對應預測結果的準確性和實時性。
(3)車輛控制能力與約束條件:能量管理對象非線性、時變,混動汽車能量管理屬于多約束條件下的多目標優(yōu)化問題。能量管理控制目標包括發(fā)動機、電機、電池、離合器等物理對象,不同系統(tǒng)的物理特性構成了優(yōu)化問題的多維約束條件。保證車輛行駛安全是混合動力汽車能量管理的重要前提條件,求解過程發(fā)生卡滯或死機會直接影響駕駛過程失穩(wěn)。因此,功能安全、預期功能安全和信息安全是非常重要的。此外,電子電氣控制架構直接決定了計算實時性與可靠性,軟件架構直接決定了能量管理策略是否可以持續(xù)在線升級。
四、混動能量管理發(fā)展的實車應用框架
混動能量管理發(fā)展的理想目標是:通過獲取多源網(wǎng)聯(lián)信息并智能預測出行域全程功率需求,將能量管理決策序列實時作用于混合動力傳動系統(tǒng),實現(xiàn)能量利用的最優(yōu)分配。然而,車載控制器無法完成能量管理過程中的全部任務環(huán)節(jié),能量管理所需多源信息感知與決策過程需依賴不同計算平臺,從而保證不同任務部署與相應計算平臺的資源相匹配。因此,ITRC團隊提出一套適用于混合動力汽車能量管理不同發(fā)展階段的工程應用框架“基于端邊云任務協(xié)作的混合動力汽車智能能量管理實車應用框架,簡稱CVEC-IEM”,如圖所示。

圖3 混合動力汽車能量管理實車應用實施框架
五、結論
1.利用智能和網(wǎng)聯(lián)技術能夠有效賦能動力傳動系統(tǒng),實現(xiàn)多動力源汽車的能量高效利用,從而推動汽車節(jié)能減排技術的發(fā)展。
2.混合動力傳動系統(tǒng)在完成傳統(tǒng)變速變扭的功能基礎上,還要完成多源信息感知和融合、出行時空域車輛功率需求的準確預測以及集成控制等一系列新的任務需求,為此,混合動力傳動系統(tǒng)也有了新的功能定義,即實現(xiàn)能量智能轉換與高效控制。
3.混合動力傳動系統(tǒng)也將從傳統(tǒng)的物理系統(tǒng)轉變成為信息物理系統(tǒng),在涉及機械、電子、液壓、單一化控制等技術的基礎上,融入了網(wǎng)聯(lián)通信、智能決策、集成控制等新技術。
4.能量管理所涉及的人-車-交通-云之間動態(tài)信息通信交互機制是一項復雜的工程問題,不僅需要高校加強基礎理論研究并突破共性關鍵技術,而且還需要政府、車企、交通基礎設施商、通信設備設施商等多方資源協(xié)同構建統(tǒng)一的信息交互標準協(xié)議與接口、芯片、計算平臺、車載電子電氣信息架構、通信、網(wǎng)聯(lián)基礎設施等一系列新產(chǎn)品,突破一系列新技術。